
1.1 карактеристике
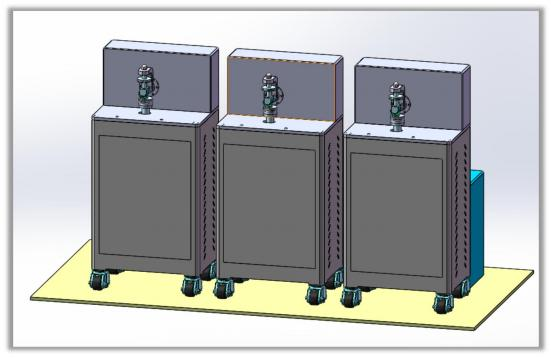
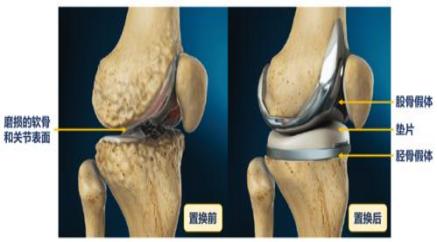
ХХ3 тестер хабања коленског зглоба се састоји од три дела: пробног главног, учвршћења и електронског управљачког дела. Може да симулира хабање, замор и љуштење имплантата колена и друге процесе оштећења, и може тестирати 3 коленска зглоба истовремено имплантата. Ова машина за тестирање аутоматски контролише тестну силу, време тестирања и брзину и мери тестну силу и обртни момент у реалном времену. Применљив је на производњу, употребу и истраживање протеза коленског зглоба и друге сродне медицинске области.
Погон вретена усваја увезени АЦ серво мотор и контролни систем, који може да реализује бесконачну регулацију брзине и потребну Израчунавање константног обртног момента/константне аксијалне силе у оквиру опсега брзине; сила испитивања се примењује помоћу система за оптерећење навојне опруге. Испитна сила се примењује стабилно и поуздано, а тестну силу може подесити оператер на интерфејсу рачунара; брзина вретена. Параметри као што су број обртаја, сила тестирања и време тестирања се контролишу од стране рачунара, који може да прикупља податке теста у реалном времену и да их нацрта. Одговарајућа тестна крива се може направити, а подаци о тесту или крива могу бити сачувани, преузети и одштампани по жељи.
Тросмерни серво мотор покретан систем оптерећења са различитим компонентама за комплетан АП зглоба, ротацију, флексију Абдукцију и друге покрете, четворокомпонентни модул сензора силе тестира аксијалну силу обртног момента, хоризонтални потисак и савијање, односно обртни момент током екстензије , тросмерни серво склоп опремљен ротационим енкодером високе прецизности, у реалном времену мерење угла и померања и обезбеђују ефикасан извор података за контролу главног рачунара.
Сваки механизам кретања је независно контролисан и координисан, са три станице и 15 оса за завршетак теста оштећења компоненти зглобова.
1.2 Главне спецификације
1. Софтвер за управљање инструментом са кинеским оперативним интерфејсом.
2. Софтвер који ради инструмент је спреман за употребу, није потребан посебан софтвер.
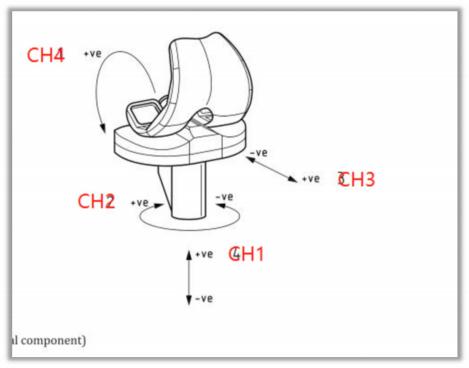
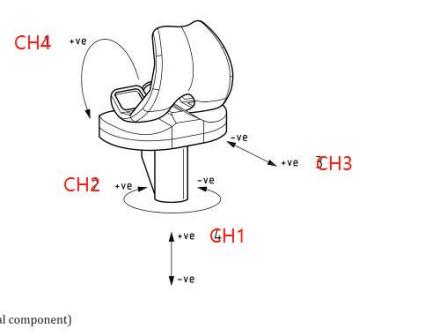
3. Степени слободе: Свака тест станица може да реализује савијање/екстензију, унутрашњу ротацију/спољну ротацију, кретање напред/назад, тродимензионалну контролу кретања и оптерећење аксијалном силом, а сваки степен слободе може бити контролисан. Детектују се и сензор и сила; могуће је слободно кретање у смеру ка унутра/спољу и ка унутра/спољу.
4. Нелинеарност сензора није већа од 0,10% пуне скале, а хистереза није већа од 0,10%, поновљивост није већа од 0,05% пуне скале.
5. Опсег сензора померања и померања: аксијални померај 100 мм, флексија/екстензија 120, унутрашња ротација/спољна ротација 20, предњи/постериорни померај 15 мм, медијални/бочни помак/ валгус 5 мм, инверзија.
6. Капацитет оптерећења и опсег сензора силе: аксијално оптерећење 3КН, унутрашњи/спољни обртни момент 20Нм, оптерећење напред/назад 1КН.
7. Тачност контроле силе и померања: Грешка силе и амплитуде померања унутар једног циклуса не сме прећи наведени максимум. Максимална фазна грешка не сме да пређе 3% пуног циклуса. Инструмент је тестиран у складу са ИСО 14243-1 и ИСО 14243-3 у сваком степену слободе који се може контролисати. Измерене криве и вредности одступања сензора силе и померања .
8. Има осмоканални аналогни улаз и може се синхронизовати са спољним подацима.
9. Тест фреквенција: 1Хз, тачност 0,1Хз.
10. Контролни систем: Требало би да буде опремљен са одвојеним мулти-станицама, вишеканалним серво контролером за постизање затворене петље аутоматске контроле силе и померања.
11. Контролер би требало да буде у стању да изврши компензацију контроле вредности од врха до долине како би осигурао да се вршна вредност захтевана сигналом може тачно постићи када се циклични таласни облик користи као контролна инструкција.
12. Требало би да буде у стању да имплементира тестирање програмирања прилагођених кривуља хода; бити у стању да изврши ручну контролу корак по корак сваког степена слободе који се може контролисати; и моћи да извезете необрађене податке у Екцел формату.
13. Током теста, софтвер би требао бити у стању да одрази криву силе и помака сваке станице у реалном времену, као и контролни систем. Систем би требало да буде у стању да аутоматски подеси криву кретања узорка да се поклапа са циљном кривом без ручне интервенције.
14. Стопа контроле затворене петље у реалном времену ≤ 6кХз, осим за режим контроле силе и померања, контролер би требало да буде у стању да имплементира израчунати режим променљиве контроле.
15. Фреквенција дигиталног узорковања не би требало да буде мања од 100 кХз, а метода узорковања треба да укључује: вршну вредност, вредност долине, временско време, максимум, минимум, просек, циклус/логаритам, итд.
16. Има двоструки режим, радни режим за ограничење канала повратне информације о каналу.
17. Има функцију самопровере да недостаје побуда сензора.
18. Температура: Температура медијума за подмазивање се може одржавати на (37 ℃) и постоји систем за контролу температуре.
19. Средство за подмазивање: Површина споја може бити уроњена у медијум за подмазивање, а медијум за подмазивање треба да буде заптивен без цурења; и опремљен уређајем за праћење цурења.
20. Компоненте за тестирање: опремљене неопходним алатом за тестирање, утоварне радне станице и утовар за све покрете Радна станица за урањање обезбеђује референтне стандардне узорке за калибрацију опреме и решавање проблема.
21. Дугме за заустављање у нужди: Опрема треба да буде опремљена дугметом за заустављање у нужди.
22. Сигурносна заштита: Опрема треба да буде опремљена прозирним и провидним термопластичним заштитним поклопцем од поликарбонатног материјала; Постоји сигурносни уређај за закључавање. Када се отворе врата заштитног поклопца, опрема би требало да буде у стању да аутоматски заустави тестирање.
1.3 Услови рада
На собној температури У опсегу од 10 ℃~ 35 ℃;
Релативна влажност није већа од 80%;
Правилна инсталација на чврсту основу;
У чистом окружењу без вибрација, корозивних медија и јаких сметњи електромагнетног поља;
Опсег флуктуације напона напајања не би требало да пређе називни напон  10% .
10% .
2. Структурни састав
Машина за тестирање је подељена на три радне станице, а то су систем погона вретена, систем за пуњење узорка и аксијална сила. Три радне станице деле исти погон вретена. Динамички систем и систем управљања софтвером.
2.1 систем погона вретена
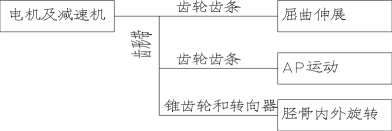
Мотор осовине користи Панасониц АЦ серво интегрисани систем контроле брзине и мотор. Максимална снага мотора је 7,5 Кв, његова снага је подељена на 3 излазне линије.
Први: После зупчаника, електромагнетног квачила и сензора обртног момента, постаје ротирајуће клатно бутне кости. Електромагнетно квачило је одговорно за контролу укључивања и искључивања, а сензор обртног момента је одговоран за мерење обртног момента . Измерите обртни момент током рада.
Други: након проласка кроз зупчасти каиш и зупчаник, постаје лево и десно реципрочно померање, покрећући кретање узорка АП.
Трећи: преко зупчастог ремена, конусног зупчаника и управљачког зупчаника, претвара се у ротациони замах тибије, терајући узорак да се окреће ка унутра и према споља.
Пут преноса је приказан на слици испод.
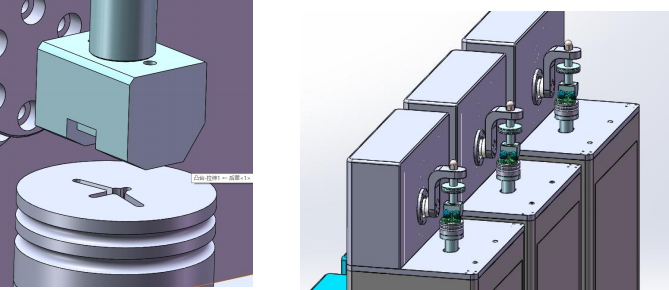
2.2 Систем за пуњење узорка
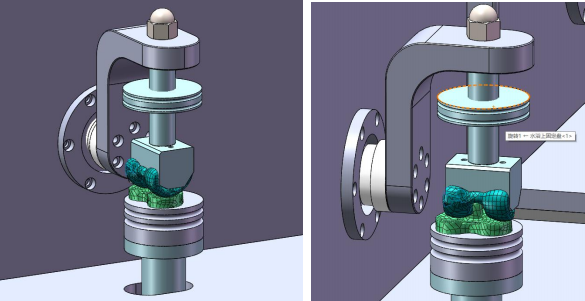
Систем за пуњење узорка симулира слободу кретања под људским условима за компоненте имплантата коленског зглоба. Инсталира се и фиксира. Састоји се од монтажног седишта, клизног седишта, најлонског седишта, ваљка, клизног рукава, итд.
Специфична имплементација је следећа:
Уградња алата за хабање коленског зглоба је релативно компликована. Инсталирајте га стриктно према дијаграму. Поред тога, прикачени су и одговарајући канали.
Молимо користите одговарајући број жице када повезујете жице.
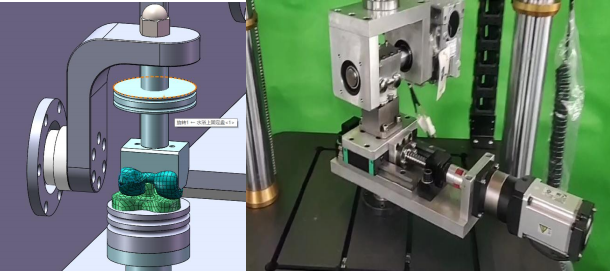
(Структура приказана на слици се користи само за демонстрацију принципа кретања, стварни објекат ће преовладати)
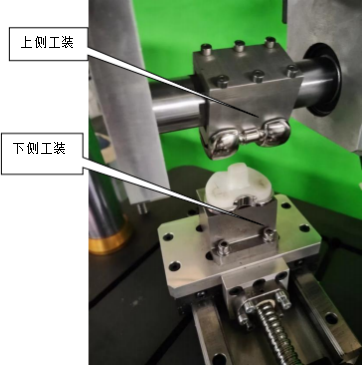

( Структура приказана на слици се користи само за демонстрацију принципа кретања, стварни објекат ће преовладати)
Морате поново да обрадите горњи и доњи алат према узорку да бисте испунили захтеве теста. (Детаљи сваке величине производа се разликују)

6. Избор канала и сродна подешавања
У комбинацији са горњом сликом, проверите који канал ради тако што ћете проверити канал. Када извршавате ИСО 14243.3, изаберите 1-4 пролаза, канал 5 је канал за проширење за наредне надоградње. За друге експерименте са једном или две осе, изаберите одговарајући канал.
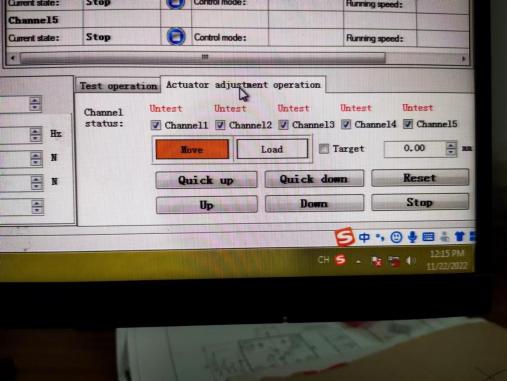
Куицк уп/уп = брзо учитавање/учитавање
Брзо доле/доле = Брзо доле/доле
7. У складу са ИСО 14243.3, потребно је увести контролни таласни облик, као што је приказано на слици:
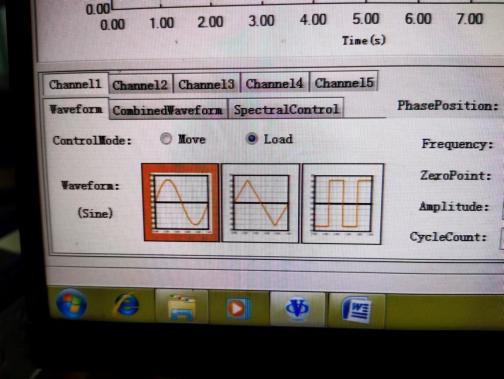
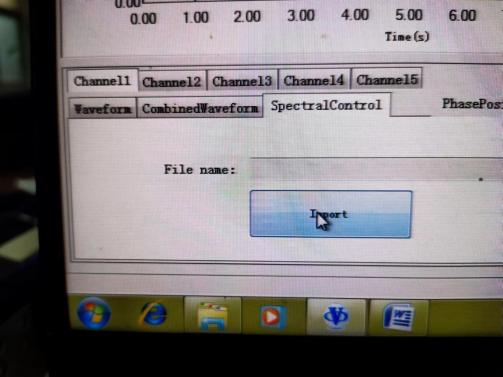
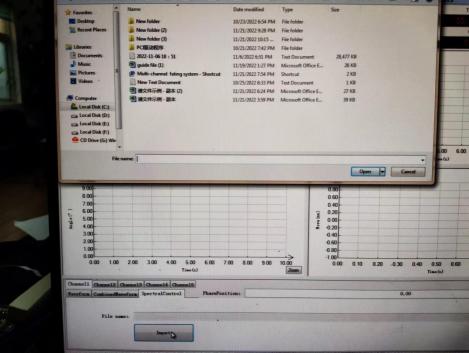
Изаберите фабрички подешени таласни облик. Ако треба да поставите нови таласни облик или радњу, то можете учинити у овој датотеци. Измените и сачувајте под другим именом.
За детаљна подешавања за сваки канал, погледајте приручник за софтвер за један канал.
8. О заштити:
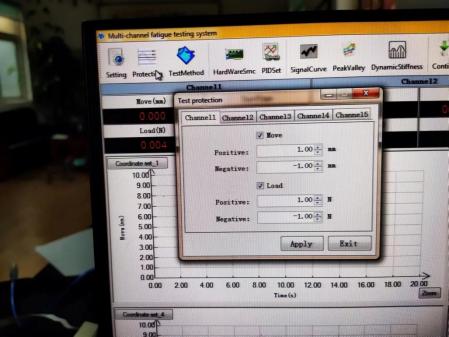
Експеримент се не помера или не може да се покрене након што кликнете на Старт, проверите да ли има параметара ван толеранције у опцијама заштите.
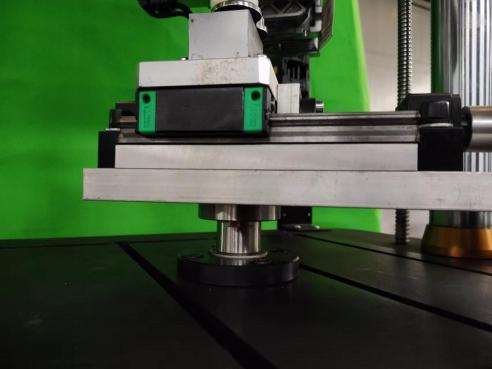
2.3 аксијални систем оптерећења
Ова машина има структуру опруге. Механизам утовара покреће корачни мотор, који се преноси кроз зупчасти каиш кружног лука, синхрони котур и пар прецизних кугличних вијака, и вођен помоћу прецизне шине за линеарно кретање за покретање седишта за примену силе. Седиште које примењује силу је фиксирано механизмом са опругом, који примењује силу на клизну платформу након што је опруга стиснута. Формира се испитна сила између тарних површина ваљкастог узорка. Контролисањем мотора да покреће седиште силе да се креће напред и назад у простору, то јест, примена и величина тестне силе се могу контролисати. Сензор оптерећења је инсталиран на равни седишта примене силе. Прикупите сигнале силе. Линеарни покретни лежај осигурава примену и стабилност испитне силе. Опружни део за утовар Једноставан за утовар и истовар.
Када пробна сила почне да се оптерећује, сензор ће унети унапред подешени притисак у контролни систем микрорачунара и унапред подешени притисак. Микрорачунар затим контролише мотор да се окреће све док се системски притисак не избалансира са унапред подешеним притиском.
2.4 Систем за намакање терета
кутије за урањање течности, грејача, сензора температуре, перисталтичке пумпе, силиконске цеви, итд.
Купци могу да обрађују рупе за позиционирање на цилиндричној крајњој површини према стварној величини узорка, а угао стезања је подесив. Након подешавања угла, закључајте леви клизач за позиционирање.
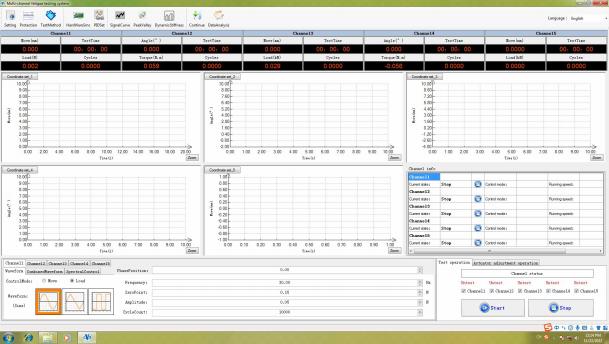
2.5 Софтверски контролни систем Контролни систем је инсталиран на контролној машини и повезан са тестним домаћином преко комуникационог кабла. Софтверско оперативно окружење је ВИНДОВС КСП. Контролни софтвер је графички интерактивни оперативни интерфејс, који је одговоран за слање инструкција за контролу покретања и заустављања система, радне брзине, силе пуњења, температуре течности за урањање и прикупљање података о раду система као што су аксијална сила, обртни момент, температура, време тестирања , итд током теста. Након прорачуна и обраде, тест сила-време, момент-време и други подаци се излазе у облику графикона. У комбинацији са горњом сликом, проверите канал да потврдите који канал ради. Када извршавате ИСО 14243.3, изаберите 1-4 канала, 5 т канал је канал за проширење за наредне надоградње. За друге експерименте са једном или две осе, изаберите одговарајући канал. Брзо уп/уп = брзо учитавање/учитавање Брзо довн/довн = брзо деинсталирај/деинсталирај 7. У складу са ИСО 14243.3, потребно је увести контролни таласни облик, као што је приказано на слици: Изаберите фабрички унапред направљен таласни облик. Ако треба да подесите нови таласни облик или радњу, можете да га измените у овој датотеци. Сачувај под другим именом. За детаљна подешавања за сваки канал, погледајте приручник за софтвер за један канал. 8. О заштити: Експеримент се не помера или не може да се покрене након што кликнете на Старт, проверите да ли има параметара ван толеранције у опцијама заштите. 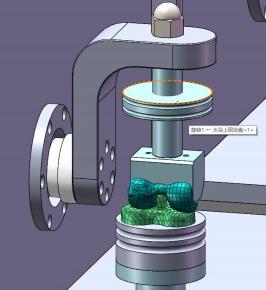
 {4909} {1906}
{4909} {1906}

 {10} {1906}
{10} {1906}
 Двоканална и машина за испитивање замора балансне траке
Двоканална и машина за испитивање замора балансне траке
 Машине за испитивање клипног трења материјала зуба
Машине за испитивање клипног трења материјала зуба
 Машина за испитивање замора савијања
Машина за испитивање замора савијања
 Машина за испитивање замора при савијању коштане плоче
Машина за испитивање замора при савијању коштане плоче
 Машина за испитивање интрамедуларног смицања ноктију
Машина за испитивање интрамедуларног смицања ноктију
 Машина за испитивање компресије и торзионог замора система унутрашње фиксације кичме
Машина за испитивање компресије и торзионог замора система унутрашње фиксације кичме